患者の皆様へ
ロボット支援手術について
当科で行っているロボット支援手術について説明します。
昨今、腹腔鏡手術が拡大・一般化してきたこともあり、ロボット支援手術もメディアで取り上げられることも多くなりました。しかし、「人命に関わるような手術をロボットにさせるなんて・・・」と考えられる方もいるかもしれません。将来的には人工知能(Artificial Intelligence; AI)の発達で、完全にロボットが手術をする未来があるかもしれませんが、現時点ではそこまで発達してはいません。“ロボット手術”とは、正確に言うとMaster-slave manipulator system 型の内視鏡下手術支援ロボットを用いた“ロボット支援手術”と言うことになります。Master(主人)-slave(奴隷)、つまり術者(主人)の動きをロボット(奴隷)が患者さんの体腔内で忠実に再現するという意味で、決してロボット自身が意志を持って勝手に手術を進めていくわけではありません。当科では、このMaster-slave manipulator system 型の手術支援ロボットであるda Vinci Surgical System®(以下 da Vinci(ダ・ヴィンチ))を用いた腹腔鏡下手術を行っています。
ロボット手術の歴史
手術支援ロボットは、戦場で負傷した兵士に対して遠隔手術を行う目的で、1992年アメリカのStanford Research Instituteで研究・開発が進められました。これが後にIntutive Surgical 社によりLennyシステムとして発表され、その後Monaシステムと改良を重ね、1999年da Vinci Surgical System®として販売されるようになりました。その後も改良が重ねられ、映像のハイビジョン化、コンソールの小型化やデュアルコンソールへの対応などが実現され、進化し続けています。もともと軍用であったという点では、現在私たちの生活に深く浸透し、欠かすことのできないインターネット技術と同じです。臨床応用については、1997年にda Vinciを用いての胆嚢摘出術がCadiereらにより初めて報告されました。その後、アメリカをはじめ多くの国で心臓血管外科、泌尿器科領域を主体に臨床の現場で使用され、その有用性が数多く報告されています。
しかし、我々の専門領域の消化器外科領域では、比較的普及が進んでいませんでした。一方、開発当初の目的であった遠隔手術については、2001年9月に同じく手術支援ロボットであるZEUS®を用いてアメリカ・ニューヨークの外科医Marescauxが6000キロメートル離れたフランス・ストラスブルグにいる68歳の女性患者に対して胆嚢摘出術を成功させました。これは1927年に大西洋単独無着陸飛行を成功させたCharles Augustus Lindberghになぞらえて、“リンドバーク手術”としてNatureに報告され、世界に衝撃を与えました。しかし、遠隔手術についてはまだまだ解決するべき問題も多く、現在も未だ研究段階にあり、実臨床での応用のめどは立っていません。
日本では、1999年に初代タイプのda Vinciが九州大学と慶応大学に導入され治験が行われましたが、本邦ではその後長い間臨床導入がほとんど進みませんでした。それどころか、全世界で広く普及してきていたにもかかわらず、da Vinciは、医療機器としての薬事法の承認が得られない時間が長く続きました。これは、日本独自の医療制度が大きく影響していたものと考えられています。ところが、2009年1月藤田保健衛生大学上部消化管外科の宇山一朗先生がda Vinci S systemを個人輸入という形で、消化器外科領域に導入し、わが国の閉塞したロボット手術に大きな風穴を開けました。2009年11月18日にはda Vinci S systemが薬事法で医療機器として承認され、2010年3月に国立大学では初めて佐賀大学にda Vinci S systemが導入されました。
その後、その改良版であるda Vinci Siを 20xx年x月に導入し、現在に至ります。泌尿器科領域では2012年4月より前立腺癌に対する前立腺全摘術に保険適応となりましたが、消化器領域では保険適応となるまでは長い時間を要しました。当科では保険適応への向け、自由診療による実績や、2016年には先進医療としての実績を残してきました。その結果が実り、2018年4月より消化器外科領域の手術にも保険適応が認められることとなりました。2018年4月現在、当科は保険診療でのロボット支援手術が可能な数少ない施設となっています。現在、da Vinci systemは第4世代のda Vinci Xiが販売されています。当院にはまだ未導入ですが、導入に向けて準備を進めています。
da Vinci手術の特徴
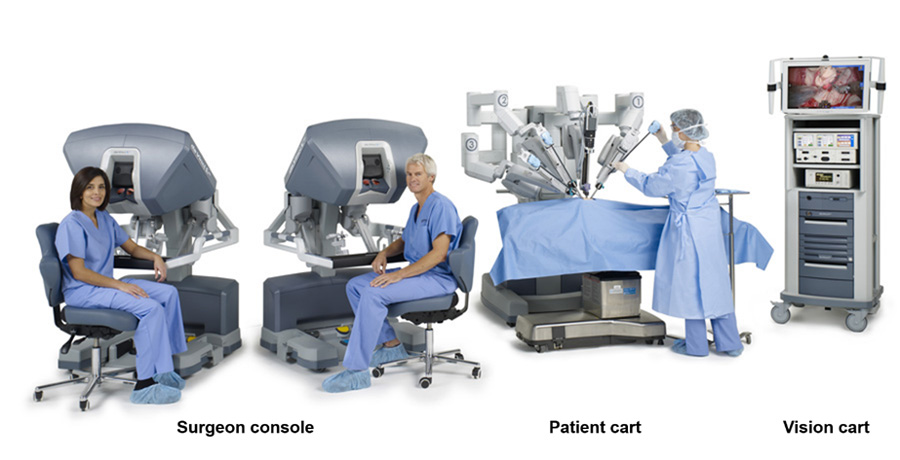
da Vinciは、アメリカのIntutive Surgical(インテューティブ・サージカル)社が製造する手術支援ロボットです。製造元の会社名にも使われている“intuteive”とは、日本語にすると“直観的に”と言う意味になります。すなわち、腹腔鏡手術のように手術に用いる鉗子に動きの制限や制約がなく、~外科医が開腹手術と同じように直観的に手術を進めることができる器械を~という願いが込められているものと思われます。器械自体は、大きく3つの部分で構成されています。つまり、外科医が映像を見ながら手術を行うsurgeon console(サージョン・コンソール)、実際患者さんに手術を行うpatient cart(ペーシャント・カート)、それと映像の処理を行うvison cart(ビジョン・カート)です。
patient cartには、専用カメラアームが1本とEndoWrist(エンド・リスト)と呼ばれる専用の鉗子を装着するアームが3本あります。EndoWristは7自由度を持つ高性能の直径8mmの鉗子です。通常腹腔鏡手術で用いる鉗子は5自由度です。さらにこのEndoWristには人間の手を遙かに超える可動域が備わっています。また、サージョンコンソールでは、執刀医がビューポートをのぞき込み、patient cartのカメラで得られた映像をハイビジョン(HD)、3次元(3D)表示モニターを見ながら、左右の手で2本のマスターコントローラーと呼ばれる部分を操作することで手術を行います。さらに執刀医は4つのフットペダルを踏み分けながら、EndoWristのついた3本のアームと1本のカメラアームを切替えながら手術を行っていきます。また、執刀医の手の動きと鉗子の動きを2:1,3:1,5:1に調整するscaling機能や術者の手の震えを除去できるfilterling機能が備えられています。通常腹腔鏡手術では、鉗子は腹壁のポートを支点とした円運動を行いますが、通常1:2程度、術野が深くなるとそれに応じて1:3あるいは1:4に変化してきます。つまり、手元で1cm動かせば、鉗子先端では2cm、3cm、4cmと動くことになります。これがda Vinci S HDでは、術野の深さにかかわらず、手元を2,3、5cm動かすと鉗子が1cm動くように設定が可能で、この比率は術野の深さにかかわらず一定にできます。さらに、支点があるわけではないので、鉗子の動きが支点を中心とした円運動とはなりません。さらにfiltering機能が搭載されていることにより、細かい作業をする際に少なからず生じる“手の震え”が除去されます。わかりやすく言うと、最近の家庭用のビデオカメラと同じような“手ぶれ防止機能”がついていると言うことでしょうか。
以上述べたようなda Vinci S HDの特徴により、腹腔鏡手術よりもより繊細な手術が可能になると考えられます。
多関節機構
7度の自由度による手指を超えた動き

HD&3D Image
左右個別のレンズでの3D、腹腔鏡を超える拡大視効果(デジタルズームを加えて最大15倍)

Scaling機能
Surgeon Consoleでの動きとPatient Cartでの動きの比率を変更(2:1, 3:1, 5:1)が可能

Filtering機能
鉗子の震えをコンピュータで除去。全く震えのないFineな剥離が可能
腹腔鏡手術との違い
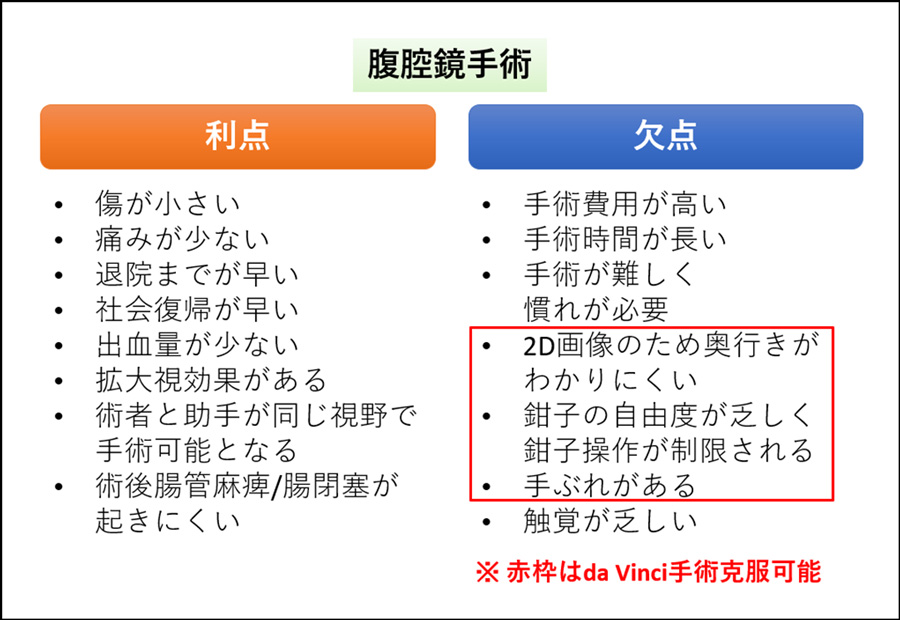
腹腔鏡下手術については、詳細は別項を示していますが、開腹手術に比べて多くの利点があると考えられており、様々な領域において腹腔鏡手術の有用性が報告されています。また、近年の腹腔鏡手術に関する器械の進歩、外科医の技術の向上、またわが国の保険診療として認められたことにより、腹腔鏡手術が消化器外科領域を中心に全国に拡大しています。一方で腹腔鏡には様々な制限があり、欠点があるのも事実です。ロボット支援手術も基本は体腔内に入れたカメラの映像と鉗子を用いた手術でありますので、腹腔鏡手術にみられる利点は同様にあると考えられます。しかし、上述したような、da Vinciの特徴が腹腔鏡手術の欠点の一部を除去してくれるものと考えられます。
※画像をクリックすると拡大します。